Drönarmätning & visualisering

DJI Matrice 600 PRO
Med sina 1133 mm i diameter är vår M600 den största drönaren med flest möjligheter. Vi kan hänga under olika sensorer beroende på vad vi vill mäta. Allt i från en vanlig systemkamera till ett LiDAR-system för att laserscanna från luften. Den här typen av drönare får inte flygas av vem som helst. Astacus har två certifierade piloter.

DJI Matrice 350 RTK
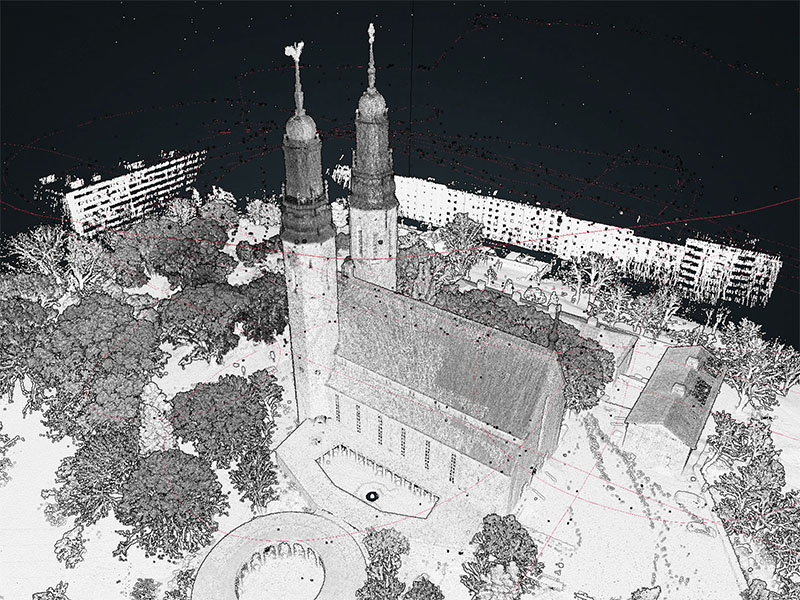
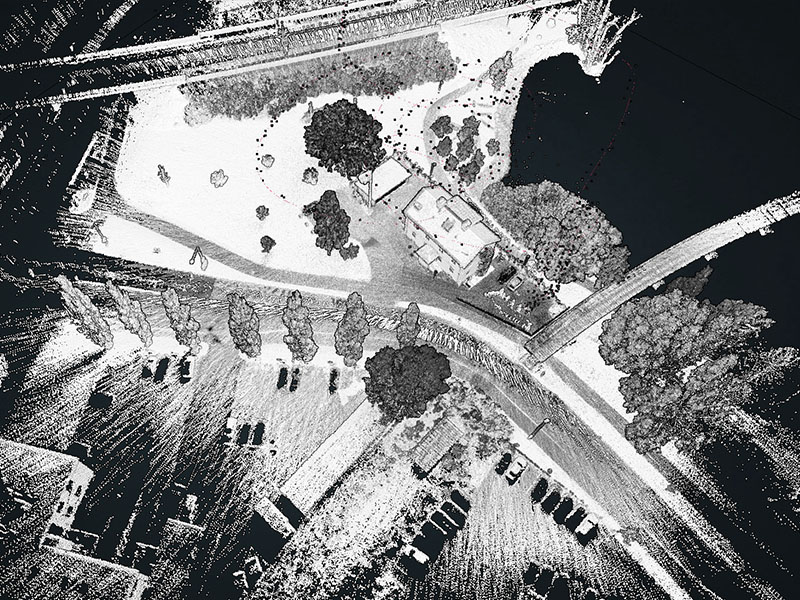
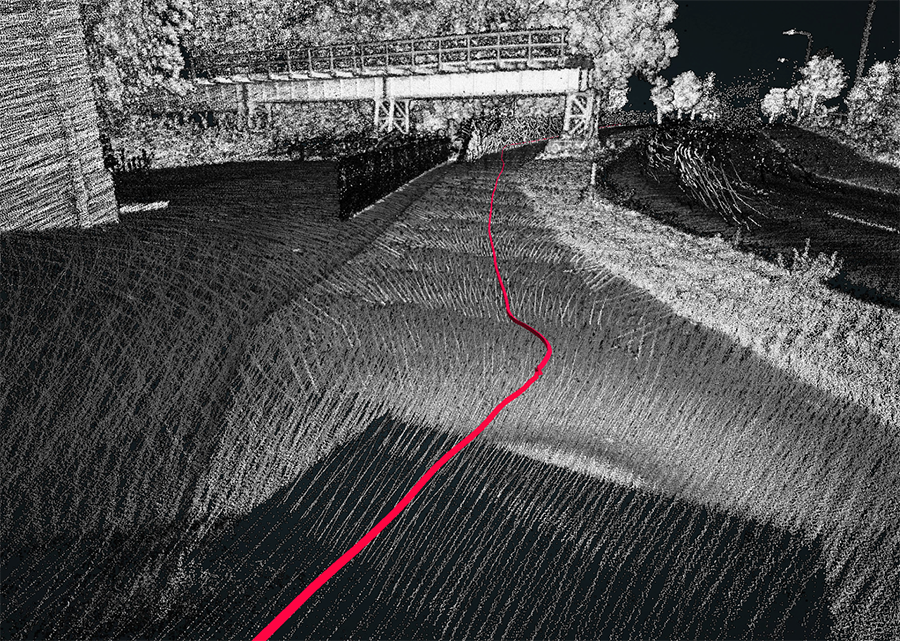
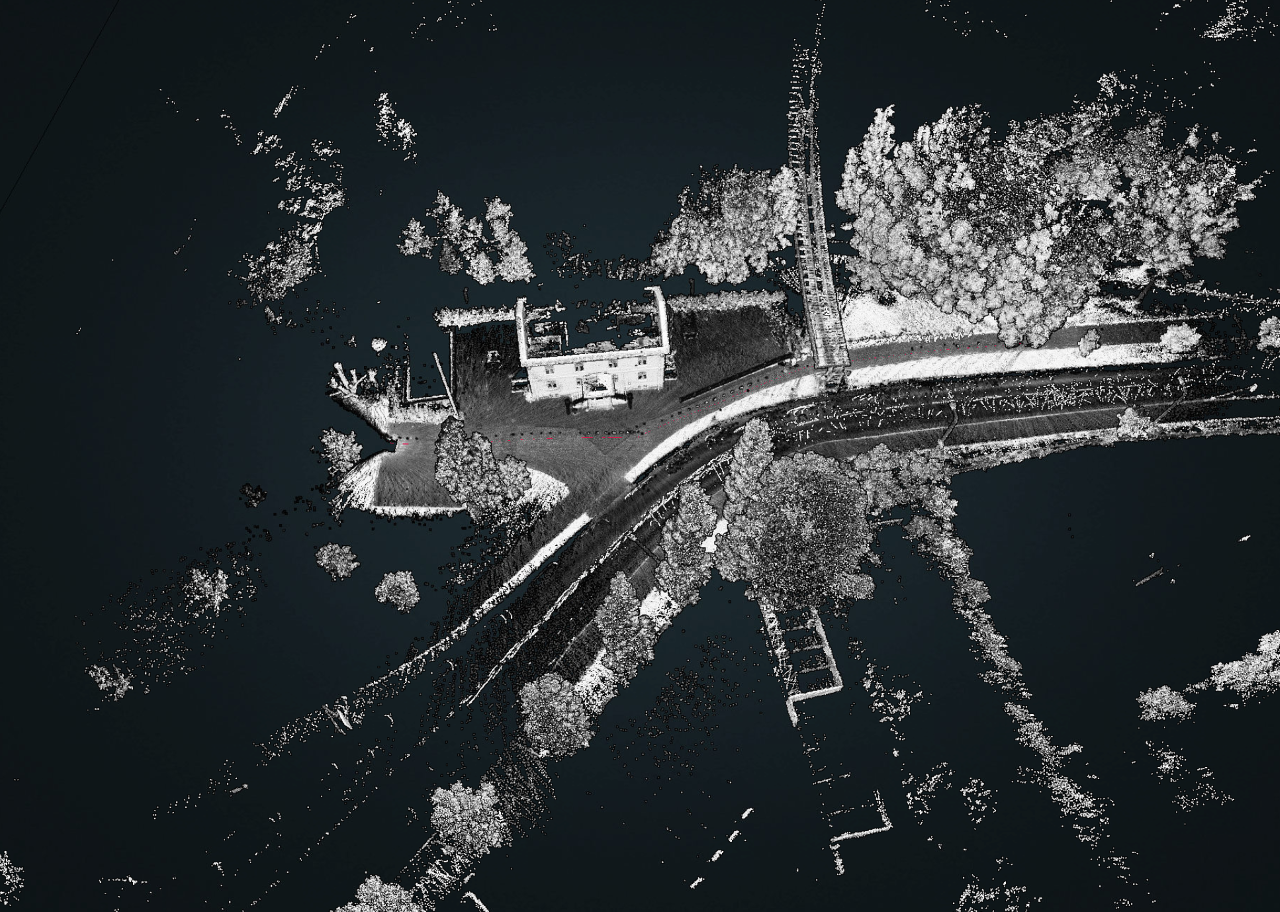
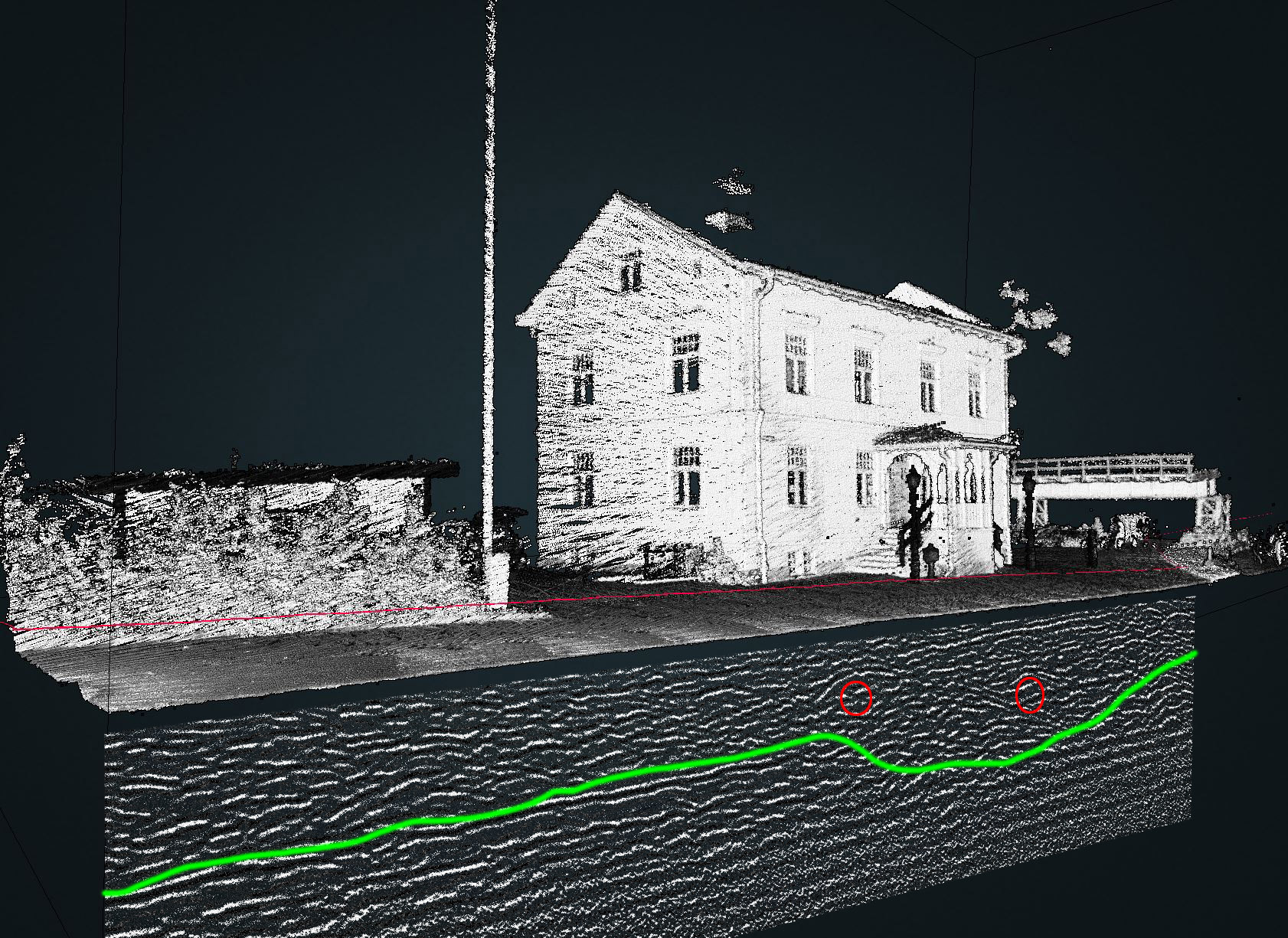
Mångsidig mellanmodell som vi använder till fotogrammetrijobb av större karaktär, energianalyser med värmekamera eller LiDAR mätningar med hög noggrannhet. Resultatet blir oftast ortofoton, punktmoln, videofilmer & 3D-modeller!

DJI Mavic 3 Enterprise
Vår minsta drönare i familjen. Den lämpar sig perfekt för enklare fotogrametrijobb av enskilda byggnader och objekt. Den är också utmärkt till inspektioner av tak och master. Kameran fotograferar RAW-bilder i 12 MP.